
ПИД регулятор в Sysmac Studio
1. Описание математической модели регулятора
Математическая модель ПИД регулятора, используемого в стандартном ФБ PIDAT в среде Sysmac Studio:
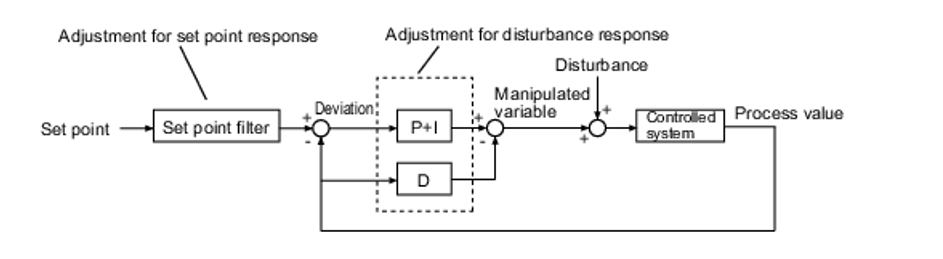
Рис.1 – Обобщенная структурная схема ПИД-регулятора
На схеме:
-
Set point – задание для регулятора;
-
Deviation – отклонение (ошибка, рассогласование), это разность между сигналом заданием и сигналом обратной связи (получаемого от датчика);
-
Maipulated variable – выход регулятора, управляющий объектом сигнал;
-
Disturbance – возмущающее воздействие;
-
Controlled system – объект управления;
-
Process value – измеряемое значение регулируемого параметра (выход объекта), он же сигнал обратной связи;
-
P, I, D – пропорциональная, интегральная, дифференциальная составляющие регулятора;
-
Set point filter – фильтрующее звено для сигнала задания.
Ниже показана та же структурная схема, но в развернутом виде:
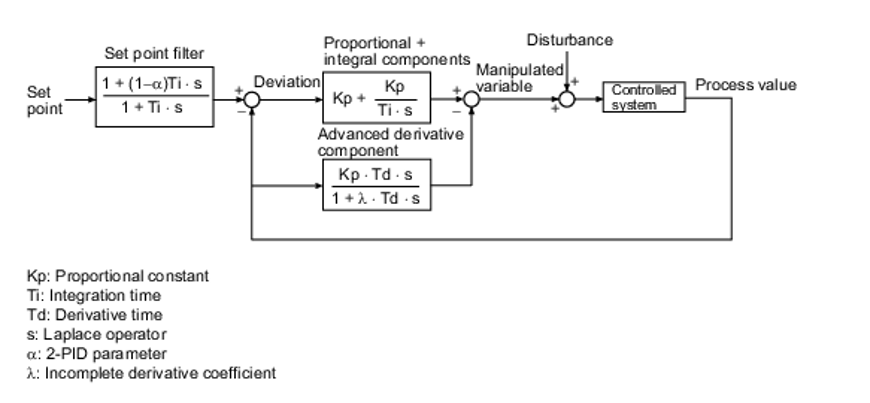
Рис.2 – Детальная структурная схема ПИД-регулятора
На схеме:
-
Kp – коэффициент усиления пропорциональной части;
-
Ti – постоянная времени интегрирования;
-
Td – постоянная времени дифференцирования;
-
s – оператор Лапласа (дифференцирования);
-
α – коэффициент фильтра сигнала задания 0..1 (позволяет делать регулятор одинаково хорошо отрабатывающим скачки как сигнала задания, так и сигнала возмущения);
-
λ – коэффициент неполной производной в усовершенствованном дифференцирующем звене.
Из приведенных схем видно, что ПИД-регулятор отличается от классического вида тем, что содержит блок фильтра для сигнала задания, а также тем, что имеет нестандартную дифференциальную часть.
2. Описание интерфейса функционального блока PIDAT
Рассмотрим применение встроенного ФБ PIDAT. Общий вид функционального блока типа PIDAT:
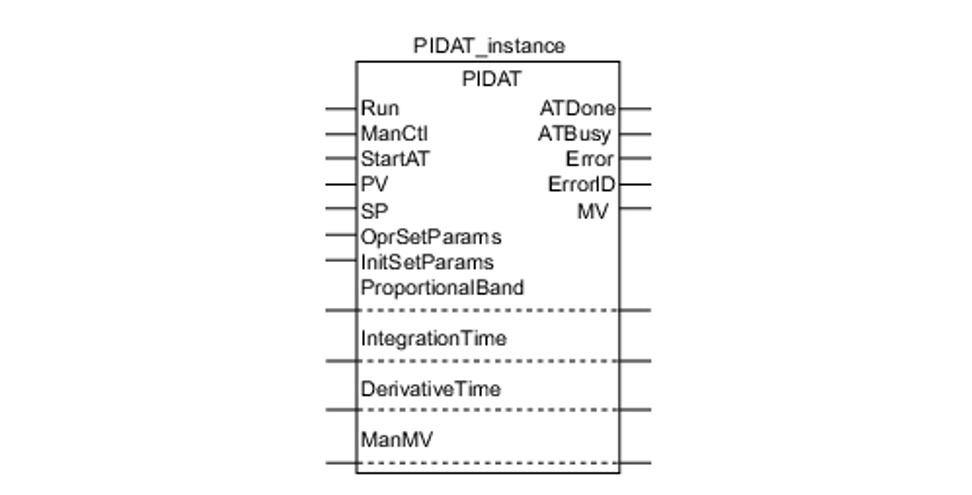
Рис. 3 – Общий вид функционального блока PIDAT
Входы блока:
|
Название |
Расшифровка |
Тип |
Значение/ описание |
Тип данных |
|
Run |
Флаг запуска |
Input |
TRUE: Выполнять FALSE: Остановить |
BOOL |
|
ManCtl |
Ручное/автомат управление выходом |
TRUE: Ручное FALSE: Автомат |
BOOL |
|
|
StartAT |
Старт автонастройки параметров ПИД |
TRUE: Выполнить FALSE: Отменить |
BOOL |
|
|
PV |
Обратная связь от датчика объекта |
- |
REAL |
|
|
SP |
Уставка (задание) регулятора |
- |
REAL |
|
|
OprSetParams |
Структура – параметры работы |
Параметры настраиваются в процессе работы |
_sOPR_SET_PARAMS |
|
|
InitSetParams |
Структура – начальные настройки |
Начальные настройки |
_sINIT_SET_PARAMS |
Входы-выходы блока:
|
Название |
Расшифровка |
Тип |
Значение |
Тип данных |
|
Proportional band |
Пропорциональный коэффициент |
In-out |
- |
REAL: 0.01 to 1000.00 |
|
Integration time |
Постоянная времени интегрирования |
Увеличение значения ослабляет интегральную часть регулятора. При нуле интегратор отключен. |
TIME: T#0.0000 s to T#10000.0000 s |
|
|
Derivative time |
Постоянная времени диффернцирования |
Увеличение значения усиливает дифференциальную часть . При нуле диф.часть отключена. |
TIME: T#0.0000 s to T#10000.0000 s |
|
|
Manual manipulated variable |
Ручной выход |
Управляемый вручную выход |
REAL: -320 to 320 |
Выходы:
|
Название |
Расшифровка |
Тип |
Значение |
Тип данных |
|
ATDone |
Флаг нормального завершения автонастройки |
Output |
TRUE: нормальное завершение FALSE: ошибка автонастройки |
BOOL |
|
ATBusy |
Автонастройка в процессе |
TRUE: Автонастройка FALSE: Автонастройки нет |
||
|
MV |
Ручной выход |
Управляемый вручную выход |
REAL: -320 to 320 |
Описание структур с параметрами OprSetParams, InitSetParams
Структура_sOPR_SET_PARAMS
|
Название |
Описание |
Тип данных |
Диапазон |
Ед.изм. |
По умолч. |
|
OprSetParams |
Параметры которые устанавливаются в процессе работы |
_sOPR_SET_PARAMS |
- |
|
|
|
MVLowLmt |
Нижний предел ручного выхода |
REAL |
-320 … 320 |
% |
0 |
|
MVUpLmt |
Верхний предел ручного выхода |
REAL |
100 |
||
|
ManResetVal |
Значение ручного выхода при отклонении = 0 для пропорционального действия
|
REAL |
-320 …320 |
0 |
|
|
MVTrackSw |
Флаг слежения TRUE: ON FALSE: OFF |
BOOL |
- |
--- |
FALSE |
|
MVTrackVal |
Значение которое устанавливается на MV когда MV слежение включено |
REAL |
-320 … 320 |
% |
0 |
|
StopMV |
Значение которое устанавливается на MV когда MV слежение остановлено |
REAL |
|||
|
ErrorMV |
Значение которое устанавливается на MV при ошибке |
REAL |
|||
|
Alpha |
Коэффицент α в фильтре задания Если равен 0 то фильтр отключен |
REAL |
0.00 …1.00 |
--- |
0.65 |
|
ATCalcGain |
Коэффициент для автонастройки При большем значении предпочтение отдается устойчивости. При меньшем значении предпочтение отдается скорости реакции. |
REAL |
0.1 … 10.0 |
1.0 |
|
|
ATHystrs |
Гистерезис предела цикла. |
REAL |
% FS |
0.2 |
Структура _sINIT_SET_PARAMS
|
Название |
Описание |
Тип данных |
Диапазон |
Ед.изм. |
По умолч. |
|
InitSetParams |
Initial setting parameters. |
_sINIT_SET_PARAMS |
--- |
--- |
--- |
|
SampTime |
Период пересчета ПИД регулятора |
TIME |
T#0.0001 s … #100.0000 s |
s |
T#0.1 s |
|
RngLowLmt |
Нижний предел PV и SP. |
REAL |
- 32000 … 32000 |
--- |
0 |
|
RngUpLmt |
Верхний предел PV и SP. |
REAL |
100 |
||
|
DirOpr |
TRUE: прямое управление FALSE: инверсное управление |
BOOL |
|
FALSE |
3. Тестовый пример в Sysmac Studio
Создадим новый проект в среде Sysmac Studio для контроллера. В конкретном примере используется контроллер NJ 101-1020.
Проект будет запускаться в режиме симуляции, так как в качестве объекта управления будет использоваться пользовательский ФБ, реализующий апериодическое звено 1-го порядка (имитация простого теплового объекта). Соответственно, ПИД регулятор будет замкнут на него.
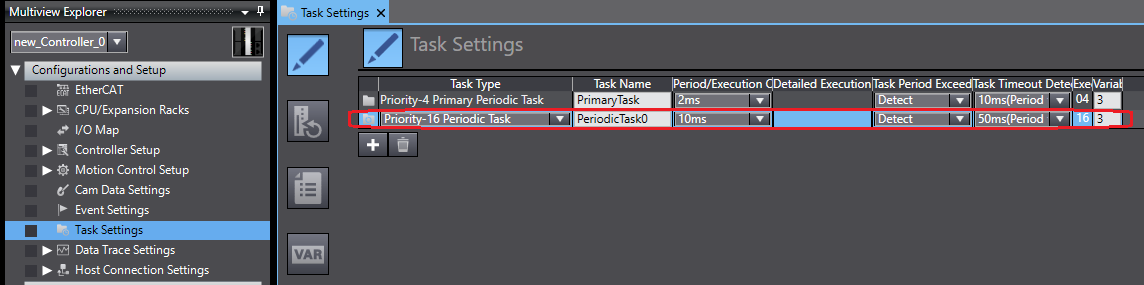
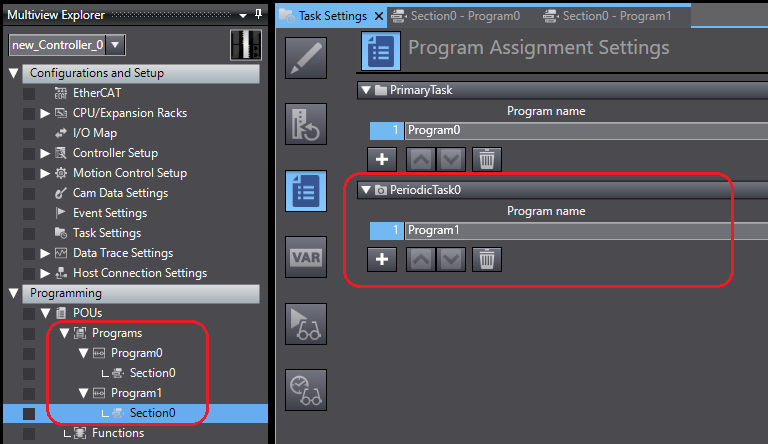
Откроем Task Settings -> Task Settings и добавим новую периодическую задачу PeriodicTask0 с приоритетом 16 и циклом пересчета в 10 мс:
Проверить, что у всех программ выставлен признак Initial Status: Run
Предполагается, что в этой новой задаче у нас будет «крутиться» ПИД-регулятор.
Далее создадим новую программу Program1 в разделе Programming. И присвоим ее новой созданной ранее задаче PeriodicTask0 в разделе Task Settings -> Program Assignment Settings :
ПИД регулятор должен чем-то управлять. Так как реального объекта у нас нет, то создадим функциональный блок, имитирующий объект управления.
Напишем функциональный блок на языке ST. Будем имитировать простой тепловой объект (типа нагреваемая емкость с водой) 1-го порядка.
Интерфейс входов и выходов ФБ Obj1:
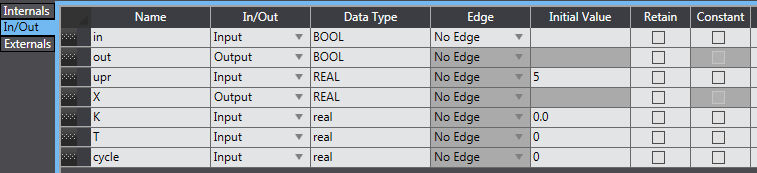
где upr – это управляющий вход объекта; X – это выход объекта (сигнал обратной связи, датчик); k, T – параметры объекта, его инерционность; cycle – это период пересчета задачи.
Код на языке ST блока Obj1:
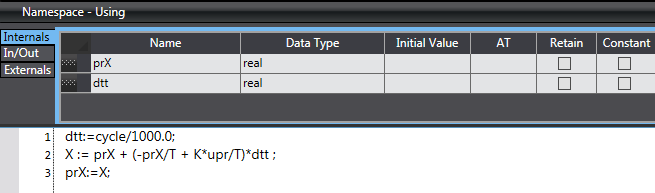
Пояснение данного кода приведено в Приложении 1.
Далее можем приступать к разработке основной программы. Её мы будем писать на языке LAD в программе Program1. (Программу Program0 однако нельзя оставлять пустой, нужно вбить хотя бы одну простейшую цепочку).
Объявим структуры и другие переменные:
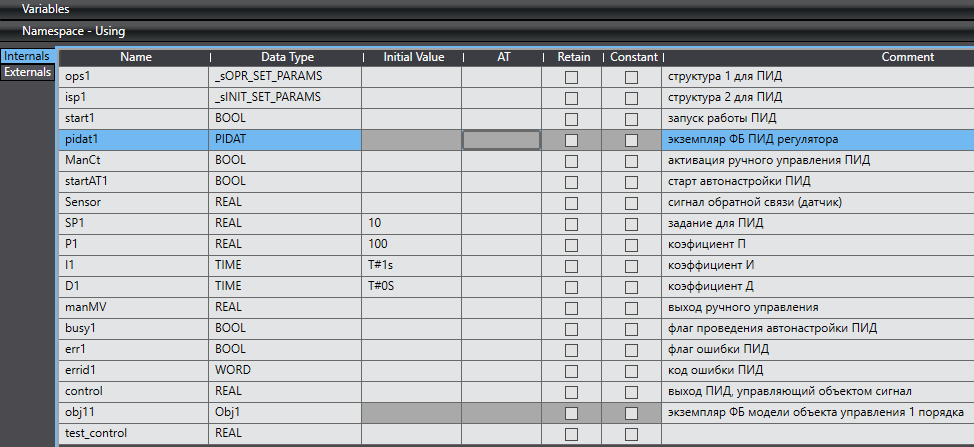
Серым выделены экземпляры функциональных блоков, используемых в программе.
Также вы можете видеть предустановленные значения у некоторых переменных. Это задание (SP1=10), и три коэффициента регулятора (P1=100, I1=1 с, D1=0 с). Ограничимся ПИ-регулятором в данной тестовой программе.
Рассмотрим код тестовой программы:
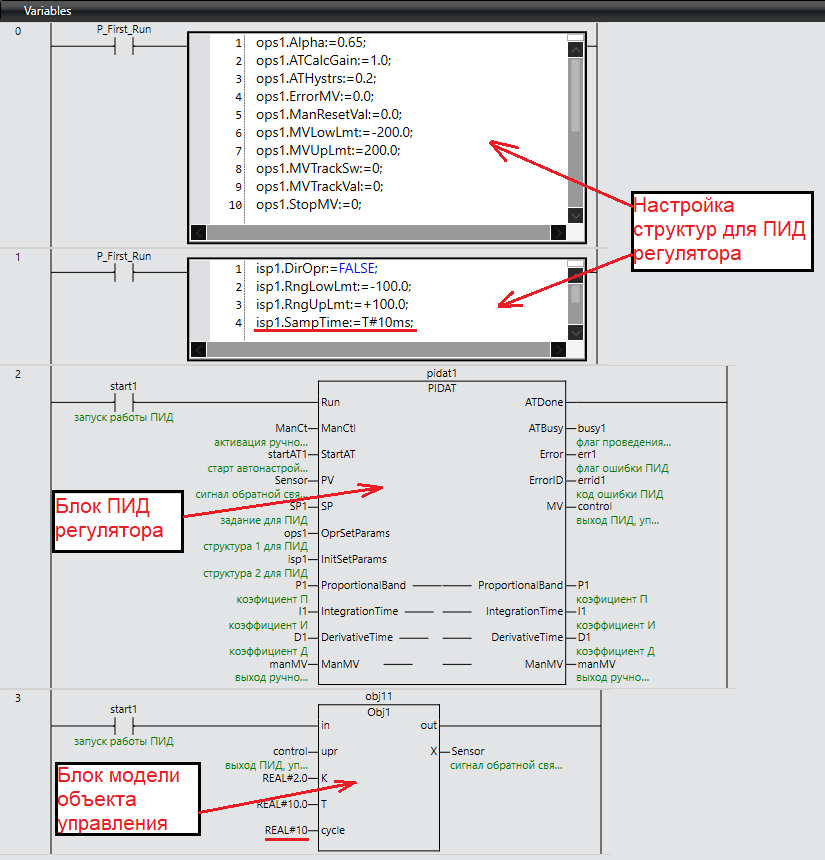
Параметр SampTime, а также вход cycle у блока модели ОУ следует указать равным 10 мс, так как период пересчета задачи Periodic Task 0 равен именно этому значению.
Связка ПИД регулятора и объекта осуществляется посредством следующих сигналов:
-
Выход регулятора control приходит на вход объекта (вход upr);
-
Выход объекта X (переменная Sensor) приходит на вход ПИД регулятора PV.
В результате получается замкнутая система.
При запуске программы ПИД регулятор остановлен.
По включению флага start1 связка ПИД регулятор + объект начинает работать. Регулятор выводит объект на задание в 10 усл.ед.
Требуется ввести новое значение задания SP и наблюдать как регулятор его отрабатывает.
Коэффициенты P1,I1,D1 возможно изменять прямо на ходу.
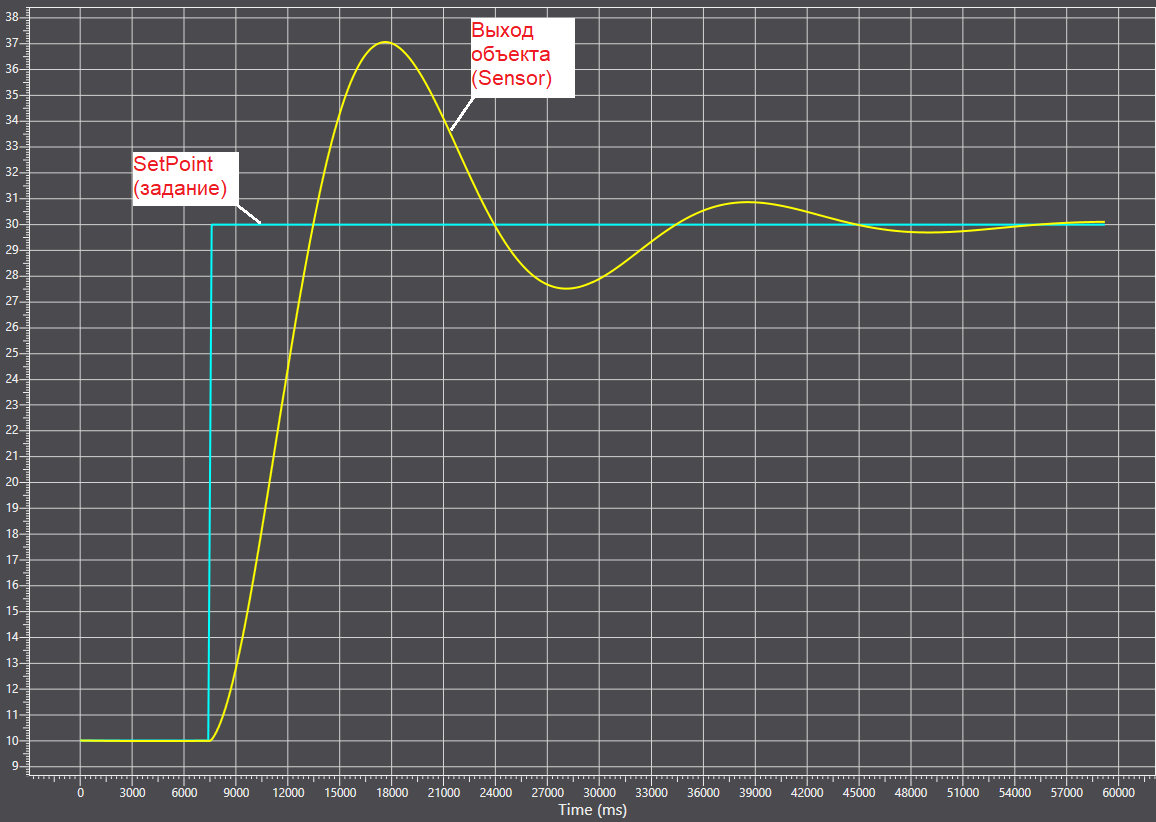
1) Переходный процесс при значениях параметров P1=100, K1=1, D1=0 и при скачке задания от 10 до 30 у.е. приведены на графике:
2) Переходный процесс при значениях параметров P1=10, K1=1, D1=0 и при скачке задания от 10 до 30 у.е. приведены на графике:
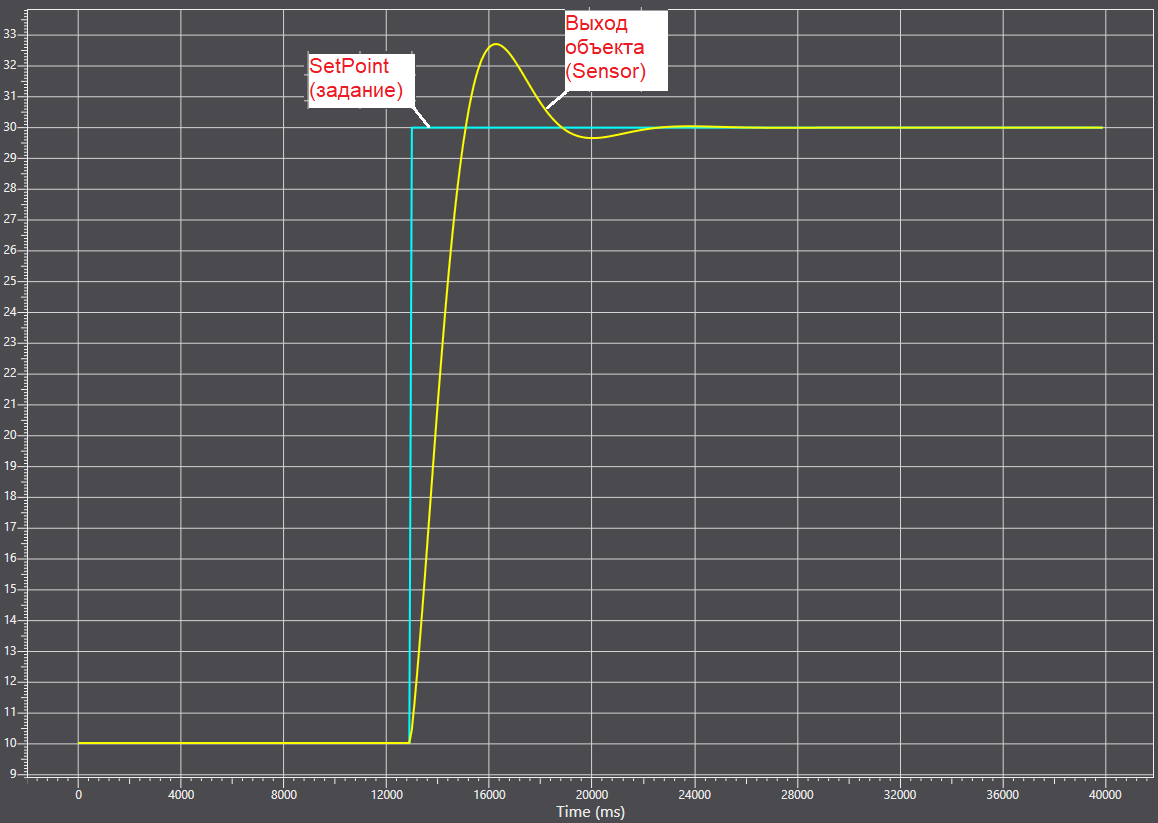
Таким образом, варьируя коэффициенты ПИД регулятора можно добиться оптимального переходного процесса при отработке задания.
При включении флага StartAT1 начинается автонастройка регулятора. В результате коэффициенты P,I,D сами изменяются. Чтобы автонастройка прошла успешнее рекомендуется подать разные задания на регулятор и дождаться завершения переходного процесса. После автонастройки следует выключить флаг StartAD1.
Приложение 1. Пояснение блока моделирующего объект 1-го порядка
В данном коде мы имитируем объект , которым управляет ПИД-регулятор. Мы ограничились объектом 1-го порядка, представленным в непрерывном виде в виде передаточной функции:
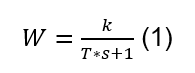
где k – коэффициент усиления (определяет соотношение между амплитудой входного управляющего сигнала и выхода объекта, то есть зависит от типа сигнала датчика, который измеряет выход объекта);
T – постоянная времени (определяет инерционность объекта, то, как долго будет расти его выход при подачи управляющего входного импульса);
s – оператор Лапласа (для записи передаточной функции в частотной области)
Такой моделью могут быть описаны простые тепловые объекты (чайник с водой).
Записанную выше передаточную функцию можно представить в виде диф.уравнения:

где u – управляющее воздействие на объект (куда подключается выход ПИД регулятора);
x – это регулируемый параметр объекта, его выход, например температура. Считаем что этот параметр измеряется датчиком и в качестве обратной связи сигнал подается на вход ПИД регулятора.
Уравнение (2) можно записать в разностном виде, если представить производную как конечную разность на малом интервале времени Δt :
Тогда уравнение (2) запишется в виде:
Выразив из уравнения  получаем:
получаем:

Получили рекуррентное уравнение, которое может быть запрограммировано в коде программы (см. строку 2 в тексте функционального блока).
Интервал времени Δt - это интервал пересчета программы ПЛК, где исполняется ПИД регулятор.
Автор: начальник УКЦ, к.т.н. - Бурцев А.Г.